W5 <<
Previous Next >> 網站影片
W16
w16_exam
MTB_robot 的取放方塊流程規劃 :
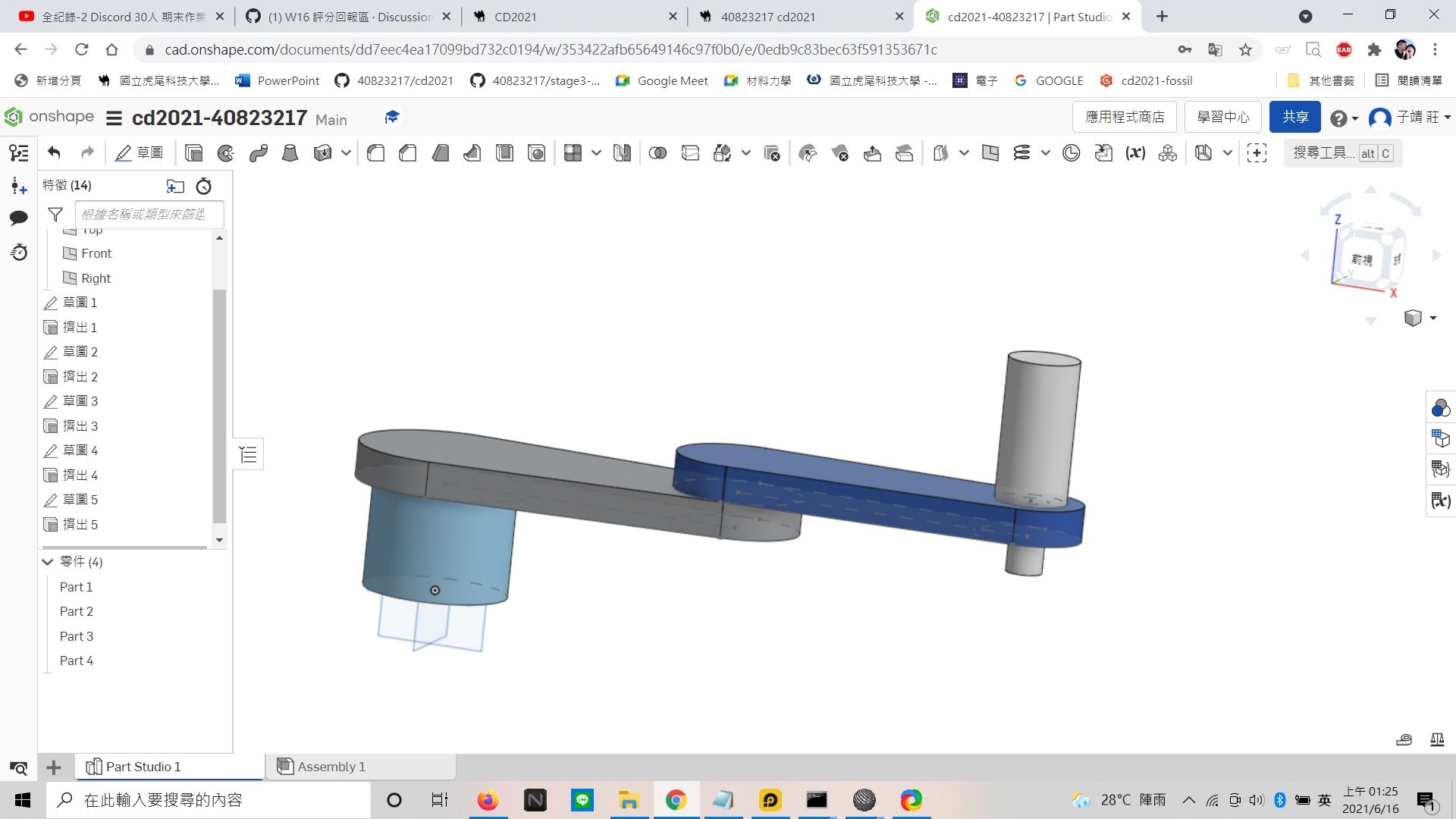
1. Onshape 零組件繪製
零組件必須在 Onshape 繪圖.
2. 建立 CoppeliaSim 4.1.0 MTB robot 場景
請以自行繪製之零件輸入 CoppeliaSim 後, 組合為 MTB robot 模型, 並利用 Leo Editor 以 require 導入 Lua 程式運作, 分別控制各軸轉動示範
3. 手臂末端加入 components-gripper-suction pad 吸盤
請接續上述 MTB robot, 在其末端接上 force sensor 後接上標準 suction pad
4. 逆向運動學函式
以程式指定方塊取放之兩個位置 - (0.2, 0.7, 0.05) 與 (-0.3, -0.55, 0.05)
5. Python remote API 逆向運動學函式
利用remote API 程式重現以迴圈方式執行 W15 兩個指定位置之方塊取放.
網站載點:W16work
(1)Onshape 零組件繪製
組合圖:
影片展示:
(2) MTB robot 場景跟gripper-suction pad 吸盤
(逆向運動學函式 /remote API 逆向運動學函式)
[Lua/remote的程式碼在這->40823217網站]
影片展示:
(3)W16_exam下載處:
https://drive.google.com/drive/folders/1C7IgSi6jL0JjDskmgIXHLYuvJUIUs2dF?usp=sharing
心得:這次的作業真的令我印象深刻,從畫圖到模擬再到寫程式,這些工作都自己來
真的覺得壓力山大,不夠也有好玩的點就是了,程式的設計還是對我還說相對困難,
不過我會繼續精進。
W5 <<
Previous Next >> 網站影片